|
HOW A MOTOR WORKS IN LIFTING A
LOAD Download directory for Matlab scripts spMotors.m The script
is used to calculate and graph the parameters that are essential in
describing the physics of a simple DC motor in lifting a load vertically from
rest to when it rises with a constant velocity. The motion of the load is
computed using a finite difference method to calculate the angular speed of
the motor as a function of time. The main variable to change in running the
script is the mass of the load. The mass is changed within the script, but
the program could be modified to enter the mass through the Command Window or
the Live Editor. INTRODUCTION Motors and generators are
very similar as they have the same construction (rotating coil in a magnetic
field). Generators convert mechanical energy into electrical energy - when
the coil is turned: the magnetic flux changes, and
an emf is induced and for a complete circuit an
induced current is generated. A
motor converts electrical energy into mechanical energy – the coil
carrying the current experiences a torque which is responsible for why the
coil rotates. However, the motor acts as a generator whenever its coil
rotates. Therefore, when the coil of the motor is rotating, an emf is generated. This self-generated emf
is called the back
emf. Lenz’s law tells us this back emf will oppose the change that created it, so that the
battery emf that powers the motor will be opposed
by back emf of the motor.
Faraday’s law of
electromagnetic induction is
For a single coil of cross-sectional area A rotating in a uniform and constant magnetic field B, the induced emf is
Thus, the back emf is proportional to the motor’s angular speed
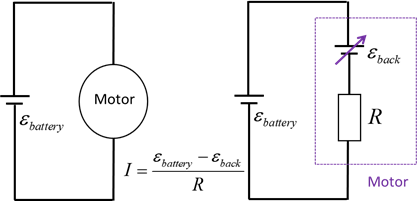
(rotation speed) The motor’s current is
When the motor is first
switched on, the coil has zero angular speed, and the back emf is zero, so the current through the motor is a
maximum. As the motor turns faster and faster, the back emf
increases, always opposing the battery emf, and
reduces the voltage across the coil and the current it draws. Thus, when a
motor first comes on, it draws more current than when it runs at its normal
operating speed. When a mechanical load is placed on the motor, the back emf drops, more current flows, and more work can be done.
If the motor runs at too low a speed, the larger current can overheat it due
to ohmic heating The single coil with
cross-sectional area A in the magnetic field B of a simple DC motor with current I will experience a torque
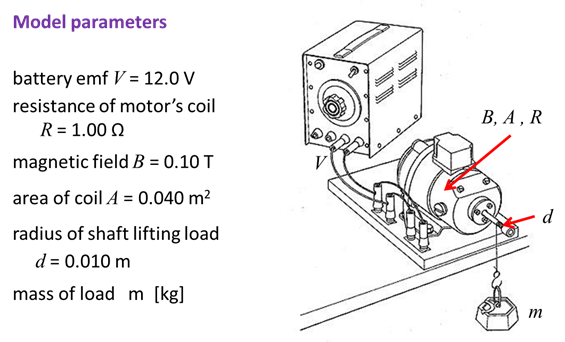
SIMULATIONS Consider a simple DC
motor that is used to lift a load as shown in the diagram.
A string is attached to
the load mass m and wound around the
motor’s axle (shaft) which has a radius d. The motion of the load
of is determined by the net torque where The torque due to the
gravitation force is We solve the equation of motion for the angular speed using a finite difference approximation: Initial values – 1st time step (t = 0 index = 1)
2nd time step (index = 2)
At the next sequence of time steps c = 3, 4, …. , After the calculation of the angular speed, back emf and current we can then calculate the power supplied by the battery, dissipated in the resistor (ohmic heating) and power from the motor to lift the load and show that energy is conserved by the system of the battery, motor and load. N.B. It is
the power provided by the motor generated by the induced
voltage that gives the back emf that is used to
lift the load.
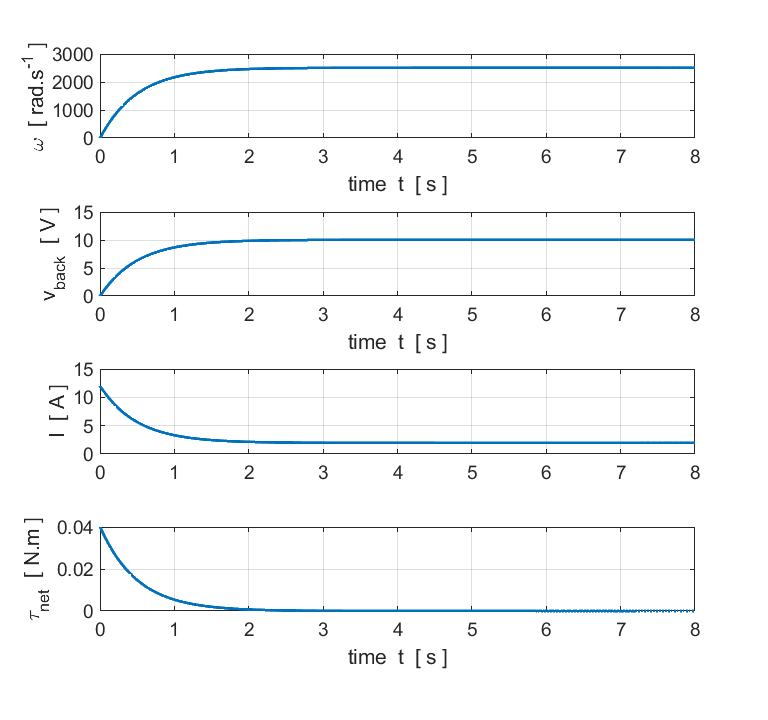
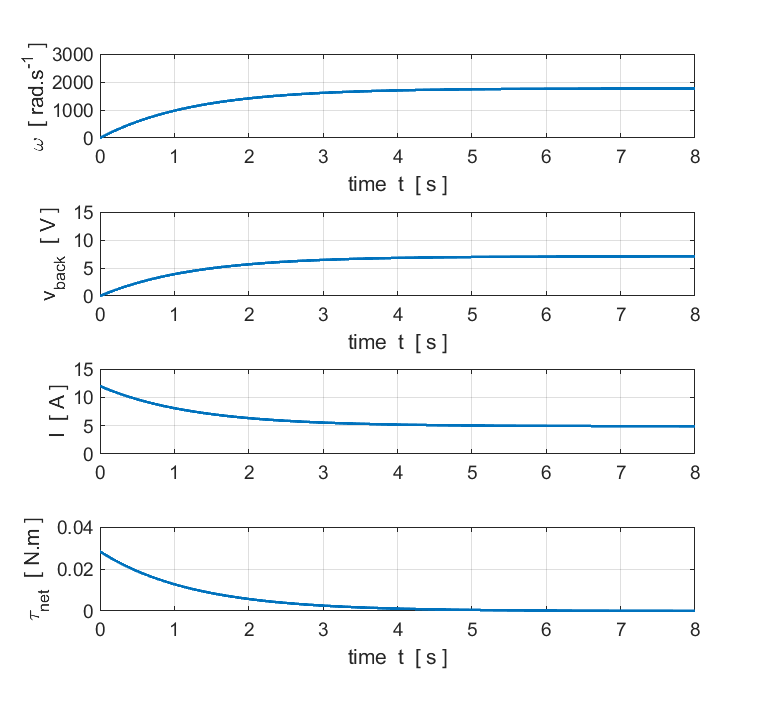
RESULTS The results are displayed graphically in a Figure Window and a summary of numerical values for the times at which the load is being lifted with a constant velocity is displayed in the Command Window. LOAD m
= 0.080 kg mass of load m = 0.08 kg torqueL = 0.0078 N.m torqueM = 0.0078 N.m Icoil = 1.96 A back emf = 10.0380 V omega = 2509 rad/s Pbattery = 23.54 w Presistor = 3.85 W Pmotor = 19.69 W
Consider the time interval from t = 6.0 s to t
= 7.0 s The axle of the motor turns through an angle The length h of the string wound on the axle of
the motor (radius of axis The increase in potential energy of the load is The rate at which the load potential energy increases is Therefore, created by the rotation of the coil through the magnetic field of the motor.
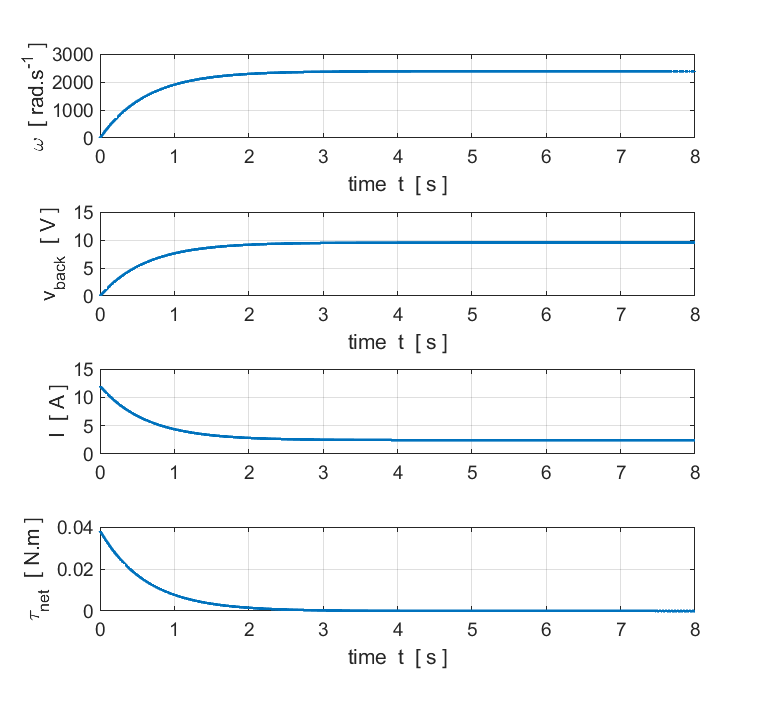
LOAD m
= 0.100 kg mass of load m = 0.100 kg torqueL = 0.0098 N.m torqueM = 0.0098 N.m Icoil = 2.45 A back emf = 9.5475 V omega = 2387 rad/s Pbattery = 29.43 w Presistor = 6.01 W Pmotor = 23.42 W
LOAD m
= 0.200 kg mass of load m = 0.200 kg torqueL = 0.0196 N.m torqueM = 0.0196 N.m Icoil = 4.90 A back emf = 7.0950 V omega = 1774 rad/s Pbattery = 58.86 w Presistor = 24.06 W Pmotor = 34.80 W
|



|
Summary of steady state values |
|||
|
mass m [kg] |
0.08 |
0.10 |
0.20 |
|
|
0.0078 |
0.0098 |
0.0196 |
|
coil current I [A] |
1.96 |
2.45 |
4.90 |
|
induced emf |
10.04 |
9.55 |
7.10 |
|
angular speed |
2.51x103 |
2.39x103 |
1.77x103 |
|
Pbattery [W] |
23.54 |
29.43 |
58.86 |
|
Presistor [W] |
3.85 |
6.01 |
24.06 |
|
Pmotor [W] |
19.69 |
23.42 |
34.80 |
|
Presistor
+ Pmotor [W] |
23.54 |
23.42 |
58.86 |
|
lifting load PG
[W] |
19.69 |
23.42 |
34.80 |
|
Larger the load Energy is conserved (assuming no energy losses due to friction or other dissipative forces other than through ohmic heating).
|
|||