|
FRAMES OF REFERENCE Vectors / Unit Vectors
Ian Cooper email
matlabvisualphysics@gmail.com
The
answer depends upon the location of an observer. Position is a relative concept.
The position of the tractor is different for the two observers. Therefore,
we need to set up a method of specifying the position of a System which is
precise and unambiguous. We will consider a two-dimensional universe. The
methods we will develop can easily be extended give the position of objects
in our real three-dimensional world (in terms of modern physics, time and
space are interwoven and a better model is to consider a four-dimensional
world [
Observer Origin O(0, 0, 0) reference
point Cartesian
coordinate axes (X,
Y, Z) Unit
vectors Specify
the units
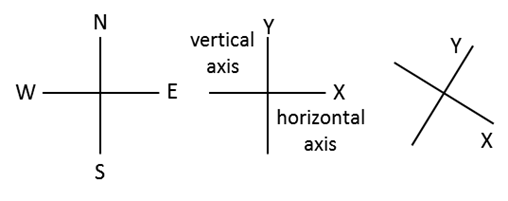
Fig. 1A. Three examples of [2D] Cartesian coordinate System. We take any point in space as an Origin O.
Through the origin O, we construct two lines at right angles to specify the X
and Y coordinate axes. These lines could be labelled [X axis Y axis] or [N S E W] or
[horizontal vertical]. The
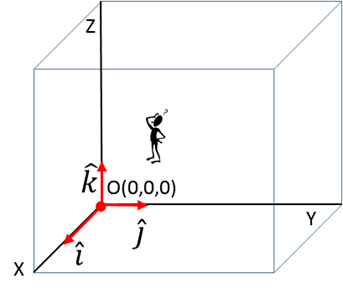
most useful frame of reference in three-dimensions is defined by three
perpendicular lines and is referred to as a Cartesian Coordinate System (figure
1).
Fig. 1B.
Cartesian coordinate System with X, Y and Z axes each perpendicular to
each other. The direction of the Z axis is given by the direction of the
thumb of the right hand when the fingers of the right hand are rotated from
the X axis to Y axis. The
unit vectors · · · The concept of unit vectors is not usually used at
the high school level but using the notation of unit vectors in the
“long run” improves your ability to have a better understanding
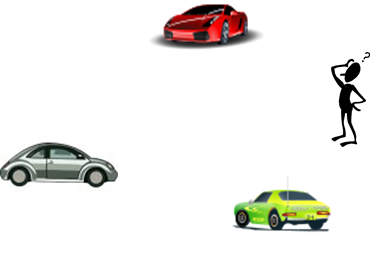
of physical principles and actually makes the physics simpler. Consider the problem of specifiying the position
(location) of three cars as shown in figure 2.
Fig. 2.
What is the position of the three cars? Figure
3 gives the position of the cars in our frame of reference where the objects
– the cars are replaced by dots.
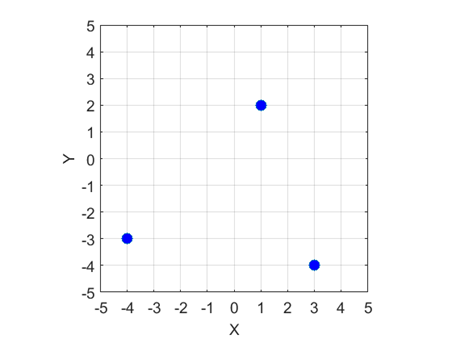
Fig. 3. The location of the cars in our Cartesian coordinate
system with origin O(0,0). The
location of the cars with respect to the Origin O is uniquely given in terms
of their X and Y coordinates. We can identify the three cars using the
labels: P(red car), Q(yellow car) and R(grey car). Location
of the cars in our frame of reference (X coordinate, Y coordinate) Red car
P(1, 2) Yellow car
Q(3, -4) Grey car R(-4, -3) The
best way to specify the location of the cars is in terms of the vector
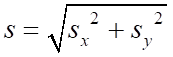
quantity called the displacement The
magnitude
of the displacement vector
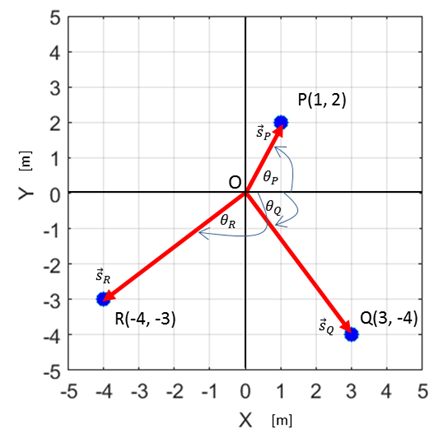
Fig. 4. The
displacements of the car with respect to the origin O. The
distance s between the
origin O(0,0) and a point at (1) The magnitude of a vector is always zero or a
positive scalar quantity. The
direction of
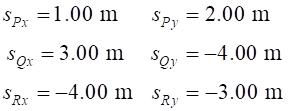
a point at (2) The components and displacement vectors of the three cars using equations 1 and 2 are: The
subscript P (red car), Q(yellow car) and
R(grey) are used to identify the
cars. The displacement of the cars can be expressed in terms of the unit vectors and X and Y components of the vector For car P (red car) For car Q (yellow car) For car R (grey car)
RELATIVE
POSITIONS We can also calculate relative positions. For example, what are the displacement of the cars with respect to an
observed located at the position of car Q. The calculation of relative
positions can be done using the concept of vector subtraction. The vector components of the three cars are:
The position of car Q with respect to the observer at Q is given
by the vector where the first
subscript is the object and the second subscript is the observed. Obviously,
the answer is correct: the displacement of the car at Q w.r.t the observer at
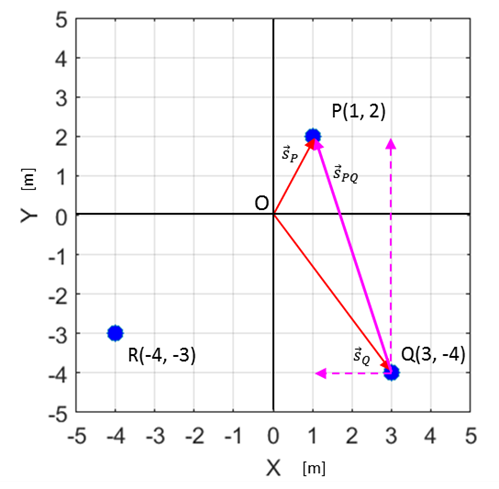
Q is zero. The position of car P with respect to the observer at Q as shown
in figure 5 is given by the vector where the first
subscript is the object P and the second subscript Q is the observed at Q.
Fig. 5. The position of
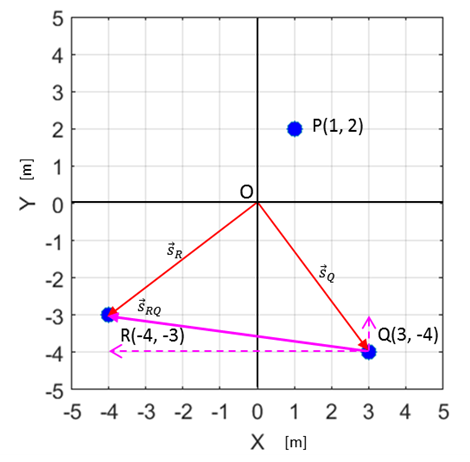
car P w.r.t. an observed located at Q. The position of car R with respect to the observer at Q as shown
in figure 6 is given by the vector
where the first
subscript is the object R and the second subscript Q is the observed at Q.
Fig.
6. The position of car R w.r.t.
an observed located at Q. REVIEW In specifying a vector quantity, it is necessary to have defined
a frame of reference (Cartesian coordinate
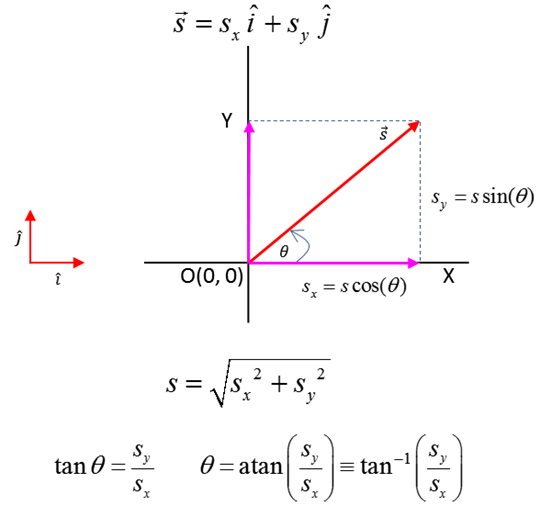
system and origin - observer). For [2D] vectors, the vector Vector Magnitude
is a positive scalar quantity Direction
(w.r.t X-axis) Components
Fig. 7. Specifying a
[2D] vector quantity. · A vector has a magnitude and direction. You
can’t associate a positive or negative number to a vector. Only the
components of a vector are zero or positive or negative numbers. · Scalars are not vectors and vectors are not
scalars. · In answering most questions on kinematics and
dynamics you should draw an annotated diagram of the physical situation. Your
diagram should show objects as dots; the Cartesian coordinate system; the
origin and observer; the values of given and implied physical quantities; a
list unknown physical quantities physical; the units for all physical
quantities; principles and equations. |