
MODULE 5
ADVANCED MECHANICS
TORQUE AND ROTATIONAL
MOTION
|
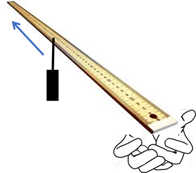
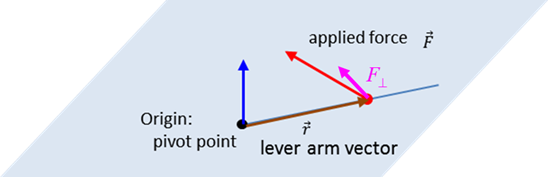
TORQUE AND THE VECTOR (CROSS) PRODUCT Hold
on to the end of a metre rule with an object dangling from it. Slide the
object from near your hand to the other end of the meter rule and feel the
ruler twist. The weight of the object is the same and so the force acting on
your hand is the same. What is different is the torque that you experience.
Torque is
the rotational counterpart of force. Forces tend to change the motion of
things. Torques tend to twist or change the state of rotation of things. To better understand
the concept of torque, we will consider the vector product of two vectors.
This treatment is not normally done at a school level. However, the more
mathematical treatment makes it easier to appreciate and correctly apply the
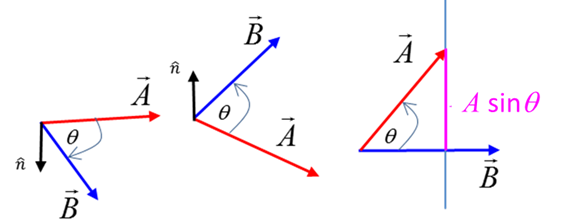
concept of torque. The vector product or cross product of two
vectors
The
magnitude of the vector The vector The angle between the two vectors is
always less than or equal to 180o. The sine function over this
range of angles is never negative, hence the magnitude of the vector product
is always positive or zero
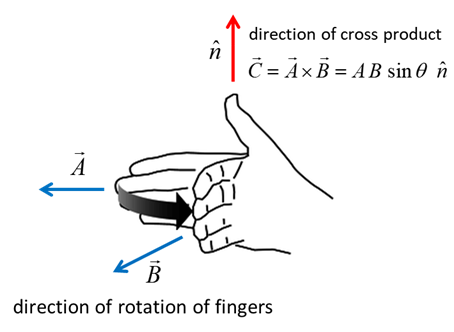
The direction of the vector product
is perpendicular to both the vectors
What is
the physics of opening a door?
It is the torque applied to the door
that is important and not the force. Torque A force can cause an object to move
and a torque can cause an object to rotate. A torque is often thought of as a
force multiplied by a distance. However, using the idea of the vector (cross)
product we can precisely define what we mean by the concept of torque.
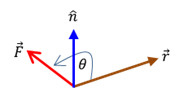
The vector
The magnitude of the torque can be
expressed as where The equation for the torque can also
be expressed as
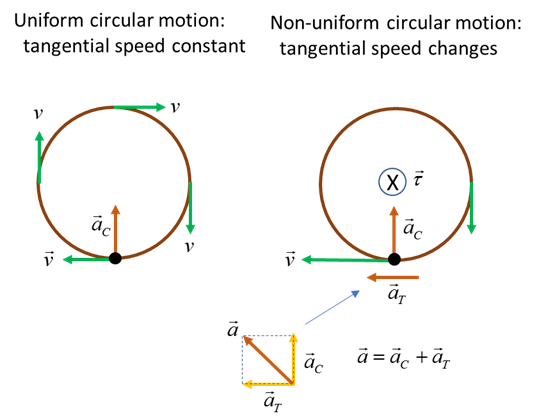
A
non-zero net force
acting on an object causes it to accelerate in the direction of the force
(Newton’s 2nd Law of motion). However, a net toque acting on an
object is necessary to cause an angular acceleration of an object. In uniform circular motion, the
tangential speed of the object is constant. To change the tangential speed, a
non-zero torque
|

|
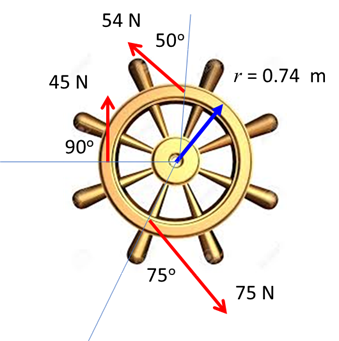
Radius of
wheel Applied
forces The torque The torque The torque The repeated calculations can be done using EXCEL or MATLAB. Work through the Matlab script to gain a better understanding of how to do the calculations. % radius
r = 0.74; % Force magnitudes
F = [45 54 75]; % Angles
theta = [90 50 75]; % Torques
tau = r .* F .* sind(theta) |
|
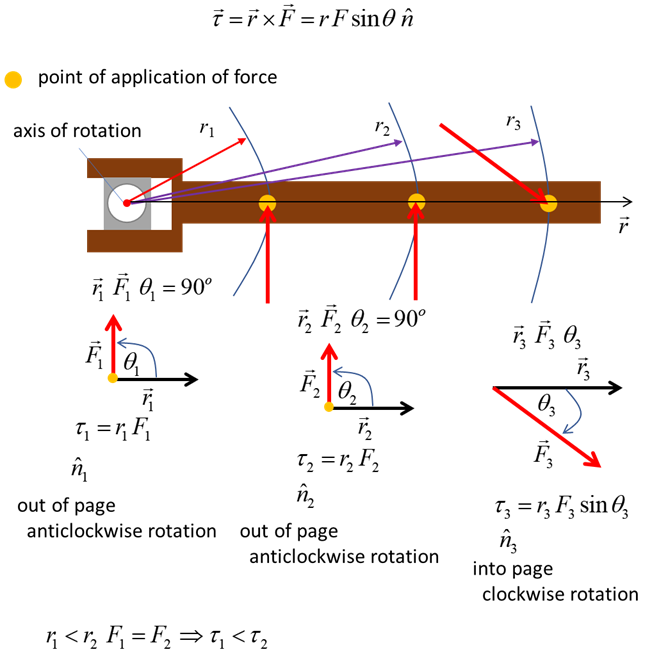
RECAP To
loosen a tight nut with a spanner as shown in the figure, you need to apply a
torque that gives an anticlockwise rotation. From experience you know that if
you apply a force as far as possible from the nut, it is more likely that the
nut will turn. If you apply a force to the spanner near the nut it might turn
but it would require a larger effort than applying the force at the far end
of the spanner. Notice that the force 1 and 2 would loosen the nut as the
applied torques produce anticlockwise rotations, but force 3 would tighten
the nut further because it produces a clockwise torque.
In answering questions on torque you
need to identify the axis of rotation and the pivot point, the point of
application of the force, the vector Note: The equation
given in the Physics Stage 6 Syllabus for the torque is incorrect |
|
Ian Cooper If you have any feedback, comments,
suggestions or corrections please email matlabvisualphysics@gmail.com |